Signal and systems miscellaneous
- If y[n] = nx[n], then its inverse system is—
-
View Hint View Answer Discuss in Forum
For the system to be invertible final output must be equal to applied input.
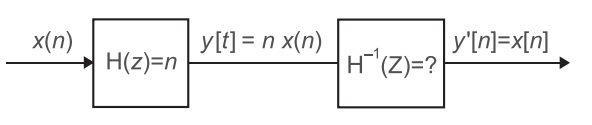
H– 1 (z) = y1(n) y(n) = x(n) nx(n) = 1 n
Hence, alternative (C) is the correct choice.Correct Option: C
For the system to be invertible final output must be equal to applied input.
H– 1 (z) = y1(n) y(n) = x(n) nx(n) = 1 n
Hence, alternative (C) is the correct choice.
- For n < 0, there is no overlap between the non-zero postions of x[k] and h[n – k] and consequently, y[n] has a value equal to—
-
View Hint View Answer Discuss in Forum
∞ y(n) = 
x(k) x[n – k] k = – ∞
i.e., convolution of two sequence x[ n] and x[ n] then loss if there is no overlap between the non-zero portion of x[ k] and x[n – 1] then y (1) will be zero.Correct Option: C
∞ y(n) = x(k) x[n – k] k = – ∞
i.e., convolution of two sequence x[ n] and x[ n] then loss if there is no overlap between the non-zero portion of x[ k] and x[n – 1] then y (1) will be zero.
- The z-transform of discrete time signal x[n] is defined as—
-
View Hint View Answer Discuss in Forum
NA
Correct Option: A
NA
- System represented by equation y′′(t) – 2t y′(t) = x(t) is—
(i) Causal
(ii) Dynamic
(iii) Non-linear
(iv) Time invariant
The correct statements are—
-
View Hint View Answer Discuss in Forum
The given system equation
y′′(t) – 2t y′(t) = x(t)
● is causal since output depends only on present and past value of the input.
● is dynamic since the I/O relation of system is an integrate-differential equation.
● is linear since there is no constant and square terms in the equation.
● is time variant since there is time factor t in the given system equation.
Hence, alternative (B) is the correct choice.Correct Option: B
The given system equation
y′′(t) – 2t y′(t) = x(t)
● is causal since output depends only on present and past value of the input.
● is dynamic since the I/O relation of system is an integrate-differential equation.
● is linear since there is no constant and square terms in the equation.
● is time variant since there is time factor t in the given system equation.
Hence, alternative (B) is the correct choice.
- System represented by equation y(t) = x(t) + 3 is—
(i) Causal
(ii) Linear
(iii) Static
(iv) Time variant
The correct statements is/are—
-
View Hint View Answer Discuss in Forum
The given system equation
y(t) = x(t) + 3
● is causal output depends only on present and past value of the input.
● is non-linear since is constant term.
● is static since there is no integrate-differential equation.
● is time invariant since there is no time factor in the given equation.
Hence, alternative (C) is the correct choice.Correct Option: C
The given system equation
y(t) = x(t) + 3
● is causal output depends only on present and past value of the input.
● is non-linear since is constant term.
● is static since there is no integrate-differential equation.
● is time invariant since there is no time factor in the given equation.
Hence, alternative (C) is the correct choice.

