Signal and systems miscellaneous
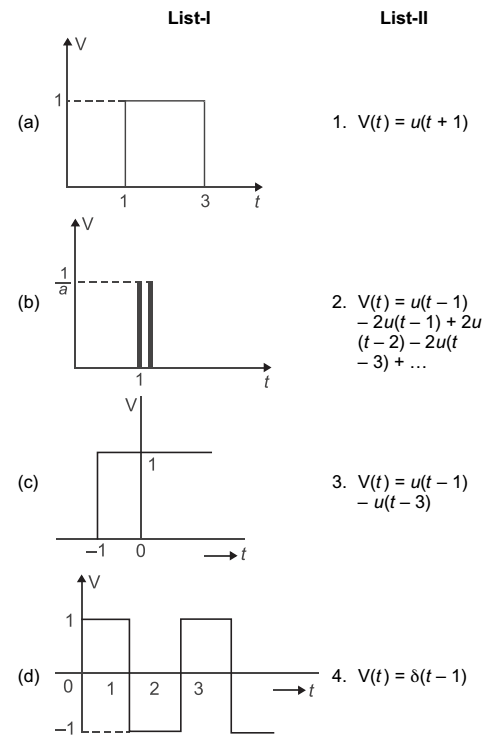
- Match list-I with List-II and select the correct answer using the codes given below the list—
-
View Hint View Answer Discuss in Forum
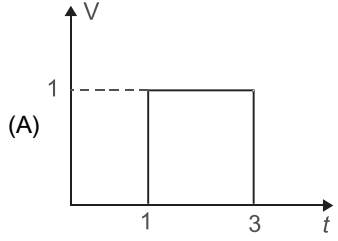
V(t) = u(t – 1) – u(t – 3) 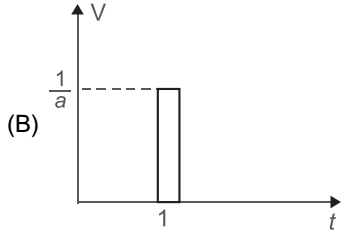
V(t) = δ(t – 1), a → 0 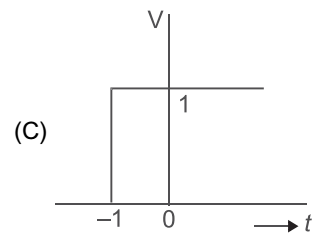
V(t) = u(t + 1) 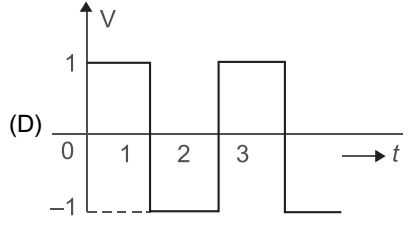
V(t) = u(t – 1) – 2u(t – 1) + 2u(t – 2) – 2u(t – 3) + ....
Hence, alternative (B) is the correct choice.Correct Option: B
V(t) = u(t – 1) – u(t – 3) V(t) = δ(t – 1), a → 0 V(t) = u(t + 1) V(t) = u(t – 1) – 2u(t – 1) + 2u(t – 2) – 2u(t – 3) + ....
Hence, alternative (B) is the correct choice.
- Which of the following periodic wave forms will have only odd harmonics of sinusoidal wave forms?
-
View Hint View Answer Discuss in Forum
NA
Correct Option: A
NA
- Which one of the following is the Fourier transform of the signal given in figure (B) if the Fourier transform of the signal in figure (A) is given
2 sin ωT1 ω 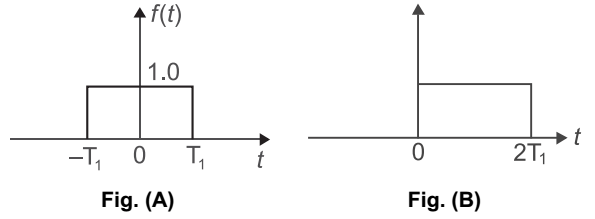
-
View Hint View Answer Discuss in Forum
F.T[f(t)] = 
∞ f(t) e– jωt dω – ∞ = T1 1e– jωt dt – T1 = 
– 1e– jωt 
T1 jω – T1 F(jω) = 2 sin ωT1 ω
Now, since the required waveform is shifted with T1 .F[f(t – T1 )] → 2 sin ωT1 .e– jωT1 ω 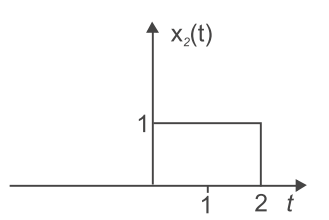
Hence, alternative (B) is the correct choice.Correct Option: B
F.T[f(t)] = ∞ f(t) e– jωt dω – ∞ = T1 1e– jωt dt – T1 = – 1e– jωt T1 jω – T1 F(jω) = 2 sin ωT1 ω
Now, since the required waveform is shifted with T1 .F[f(t – T1 )] → 2 sin ωT1 .e– jωT1 ω
Hence, alternative (B) is the correct choice.
- Let u(t) be the unit step function. Which of the wave forms in fig. corresponds to the convolution of u(t) – u(t – 1) with u(t) – u(t – 2)?
-
View Hint View Answer Discuss in Forum
Given x1(t) = u(t) – u(t – 1)
x2(t) = u(t) – u(t – 2)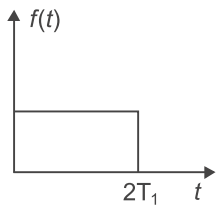
x(t) = x1(t) * x2(t)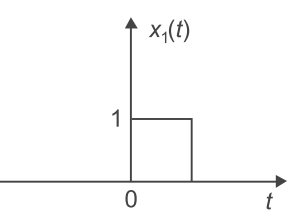
or x(t) = ∞ x1(τ) x2(t – τ )dτ – ∞ 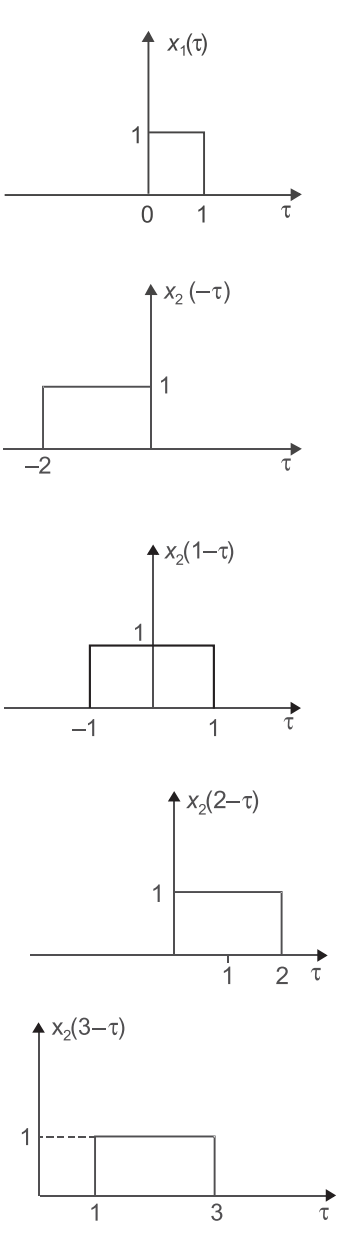
Hence, alternative (B) is the correct choice.Correct Option: B
Given x1(t) = u(t) – u(t – 1)
x2(t) = u(t) – u(t – 2)
x(t) = x1(t) * x2(t)or x(t) = ∞ x1(τ) x2(t – τ )dτ – ∞
Hence, alternative (B) is the correct choice.
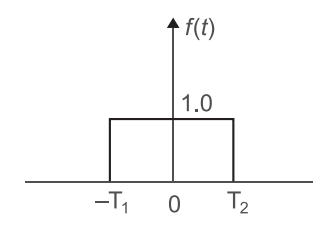
- Figure-I and figure-II show respectively the input x(t) to a linear time-invariant system and the impulse response h(t) of the system.

The output of the system is zero every where except for the time interval—
-
View Hint View Answer Discuss in Forum
Given x(t) and h(t) y(t) = x(t) * h(t)
y(t) = ∞ x(τ) h(t – τ)dτ – ∞ 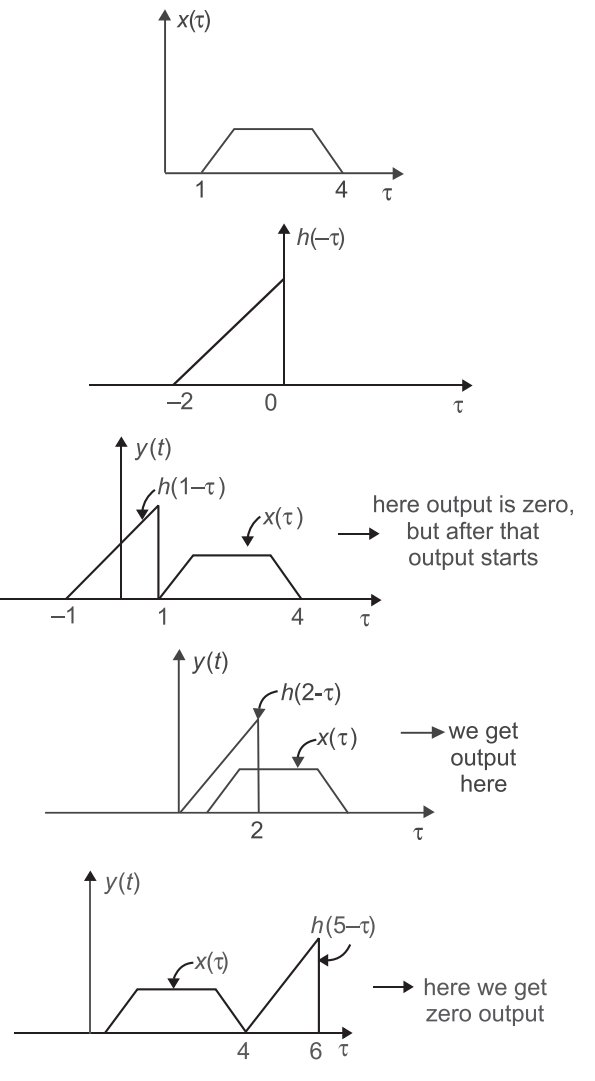
Thus, we conclude that the output of the system is zero everywhere except for the time interval.
1 < t < 5Correct Option: C
Given x(t) and h(t) y(t) = x(t) * h(t)
y(t) = ∞ x(τ) h(t – τ)dτ – ∞
Thus, we conclude that the output of the system is zero everywhere except for the time interval.
1 < t < 5

