Signal and systems miscellaneous
- Match List-I with List-II
List-I List-II A. 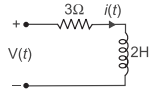
1. Linear and time variant B. 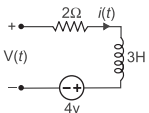
2. Non-linear and time variant C. 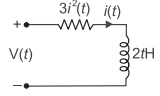
3. Linear and time variant D. 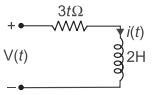
4. Non-linear and time variant
-
View Hint View Answer Discuss in Forum
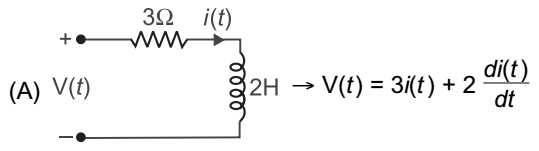
represents a linear and time invariant system.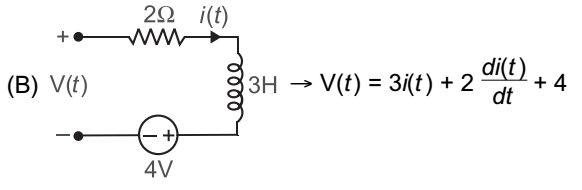
constant term 4 make the system non-linear, while it represents time invariant.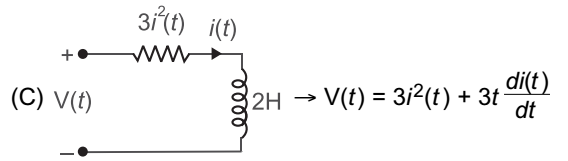
term 3i2(t) make non-linear and coefficient of di(t)/dt i.e., t makes the system time-variant.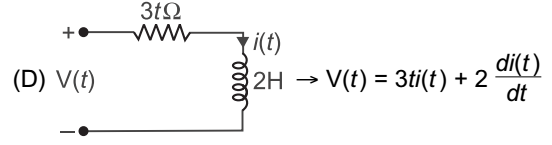
The coefficient of i(t) i.e., makes the system time-variant while the system is linear.Correct Option: B
represents a linear and time invariant system.
constant term 4 make the system non-linear, while it represents time invariant.
term 3i2(t) make non-linear and coefficient of di(t)/dt i.e., t makes the system time-variant.
The coefficient of i(t) i.e., makes the system time-variant while the system is linear.
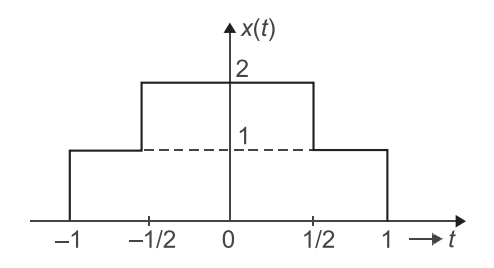
- The function x(t) is shown in the given figure. If X(jω) is the Fourier transform of the x(t), then |X(jω)| at ω = 0 will be—
-
View Hint View Answer Discuss in Forum
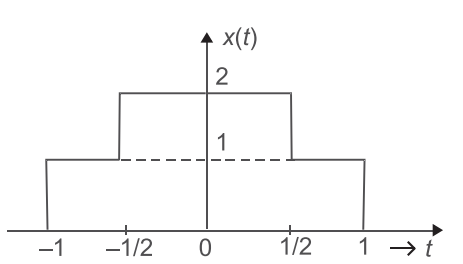
Given waveform of x(t) is a combination of four shifted step function i.e.,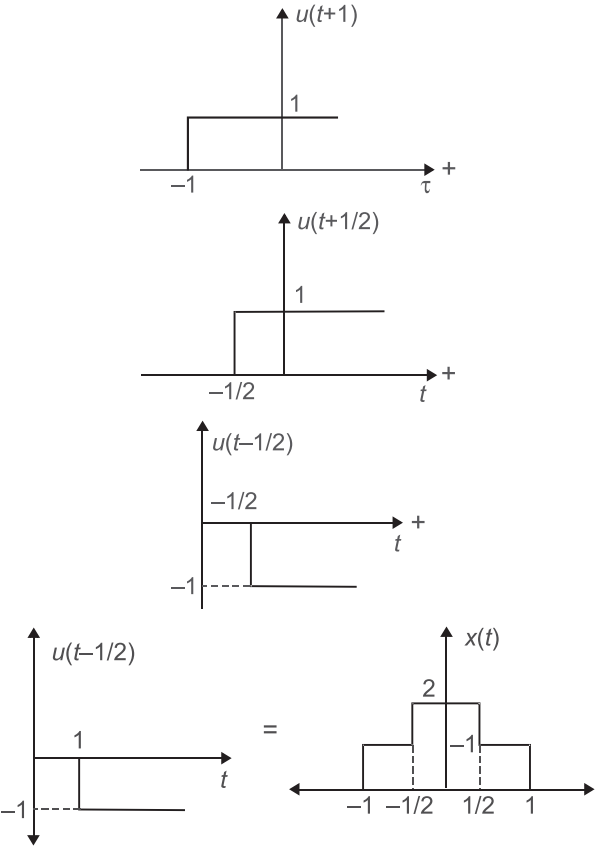
i.e., x(t) = u 
t + 1 
+ u t + 1 - u t - 1 -u (t - 1).......A 2 2 2 F[x(t)] = ejω + ejω/2 − e−jω/2 − e−jω jω jω jω jω X(jω) = ejω − jω/2 + ejω/2 − e jω/2 jω jω X(jω) = 2 sin ω + 2 sin ω ω ω 2 |X(jω)|at ω = 0 = limω → 0 
2 sin ω + 2 sin ω 
ω ω 2 = limω → 0 2.cos ω + 2 cos ω . 1 1 2 2
= 2 + 1 = 3.
Hence, alternative (D) is the correct choice.Correct Option: D
Given waveform of x(t) is a combination of four shifted step function i.e.,i.e., x(t) = u t + 1 + u t + 1 - u t - 1 -u (t - 1).......A 2 2 2 F[x(t)] = ejω + ejω/2 − e−jω/2 − e−jω jω jω jω jω X(jω) = ejω − jω/2 + ejω/2 − e jω/2 jω jω X(jω) = 2 sin ω + 2 sin ω ω ω 2 |X(jω)|at ω = 0 = limω → 0 2 sin ω + 2 sin ω ω ω 2 = limω → 0 2.cos ω + 2 cos ω . 1 1 2 2
= 2 + 1 = 3.
Hence, alternative (D) is the correct choice.
- System represented by equation
y(t + 4) + 2y(t) = x(t + 2) is:
(i) causal
(ii) linear
(iii) time invariant
The correct statements are—
-
View Hint View Answer Discuss in Forum
Given equation y(t + 4) + 2y(t) = x(t + 2)
● is causal since output at any instant of time depends only on present and past values of there input signal.
● is linear since there is no constant term in the given equation.
● is time invariant since there is no any time factor in the given equation.
Hence, alternative (D) is the correct choice.Correct Option: D
Given equation y(t + 4) + 2y(t) = x(t + 2)
● is causal since output at any instant of time depends only on present and past values of there input signal.
● is linear since there is no constant term in the given equation.
● is time invariant since there is no any time factor in the given equation.
Hence, alternative (D) is the correct choice.
- System described by the equation
(i) y′′(t) + 3y′(t) + 2y(t) = x(t)
(ii) y′′(t) + 3y′′(t) = x(t)
-
View Hint View Answer Discuss in Forum
Given equation
(i) y′′(t) + 3y′(t) + 2y(t) = x(t)
or (s2 + 3s + 1) Y(s) = X(s)Y(s) = 1 X(s) s2 + 3s + 1
Roots of characteristic equation
s2 + 3s + 1 = 0
(s + 1) (s + 2) = 0
s = – 1, – 2
Here, all the roots are lie on the left hand side of s-plane hence the system is stable.
(ii) y′′′(t) + 3y′′(t) = x(t)
(s3 + 3s2) Y(s) = X(s)Y(s) = 1 = 1 X(s) s3 + 3s2 s2 + (s + 3)
Since, the two poles are lie on the origin therefore, the given system is unstable.
Hence, alternative (A) is the correct choice.Correct Option: A
Given equation
(i) y′′(t) + 3y′(t) + 2y(t) = x(t)
or (s2 + 3s + 1) Y(s) = X(s)Y(s) = 1 X(s) s2 + 3s + 1
Roots of characteristic equation
s2 + 3s + 1 = 0
(s + 1) (s + 2) = 0
s = – 1, – 2
Here, all the roots are lie on the left hand side of s-plane hence the system is stable.
(ii) y′′′(t) + 3y′′(t) = x(t)
(s3 + 3s2) Y(s) = X(s)Y(s) = 1 = 1 X(s) s3 + 3s2 s2 + (s + 3)
Since, the two poles are lie on the origin therefore, the given system is unstable.
Hence, alternative (A) is the correct choice.
- The given system equation
y′(t) + 2y2(t) = 2x′(t) – x(t) is—
-
View Hint View Answer Discuss in Forum
Given system equation
y′(t) + 2y2(t)=2x′(t) – x(t)
Since, there is no time factor in the given equation, therefore, given system is time invariant but term y2(t) make the system equation non-linear.
Therefore, alternative (B) is the correct choice.Correct Option: B
Given system equation
y′(t) + 2y2(t)=2x′(t) – x(t)
Since, there is no time factor in the given equation, therefore, given system is time invariant but term y2(t) make the system equation non-linear.
Therefore, alternative (B) is the correct choice.

