Signals and systems electrical engineering miscellaneous
- An input signal x(t) = 2 + 5sin(100πt) 2 is sampled with a sampling frequency of 400 Hz and applied to the system whose transfer function is represented by
Y(z) = 1 
(1 - z-N) 
Z(z) N (1 - z-1)
where, N represents the number of samples per cycle. The output y(n) of the system under steady state is
-
View Hint View Answer Discuss in Forum
NA
Correct Option: C
NA
- A discrete system is represented by the difference equation

X1 (k + 1) 
a a - 1 X1(k) X2 (k + 1 ) a + 1 a X2(k)
It has initial conditions X1 (0) = 1; X2 (0) = 0. The pole locations of the system for a = 1, are
-
View Hint View Answer Discuss in Forum
From the given difference equation,
A = a a - 1 a + 1 a
The pole locations of the system for a = 1.Then A = 1 0 2 1
SI – A| ⇒ (s – 1)² = 0
S = 1 ± j0Correct Option: A
From the given difference equation,
A = a a - 1 a + 1 a
The pole locations of the system for a = 1.Then A = 1 0 2 1
SI – A| ⇒ (s – 1)² = 0
S = 1 ± j0
- Consider an LTI system with impulse response h(t) = e–5t u(t). If the output of the system is y(t) = e–3t u(t) then the input, x(t), is given by
-
View Hint View Answer Discuss in Forum
h(t) = e–5t u(t)
Laplace transform gives,H(s) = 1 s + 5
y(t) = e–3t u(t) – e–5t u(t)
Laplace transform gives,Y(s) = 1 - 1 = 2 s + 3 s + 5 (s + 3)(s + 5) Then, X(s) = Y(s) = 2(s + 5) = 2 H(s) (s + 3)(s + 5) s + 3
Inverse Laplace transform gives,
x(t) = L–1 X (s) = 2e–3t u(t)Correct Option: B
h(t) = e–5t u(t)
Laplace transform gives,H(s) = 1 s + 5
y(t) = e–3t u(t) – e–5t u(t)
Laplace transform gives,Y(s) = 1 - 1 = 2 s + 3 s + 5 (s + 3)(s + 5) Then, X(s) = Y(s) = 2(s + 5) = 2 H(s) (s + 3)(s + 5) s + 3
Inverse Laplace transform gives,
x(t) = L–1 X (s) = 2e–3t u(t)
- Consider an LTI system with transfer function
H(s) = 1 s(s + 4)
If the input to the system is cos(3t) and the steady state output is A sin(3t + a), then the value of A is
-
View Hint View Answer Discuss in Forum
H(s) = 1 s(s + 4)
Input r(t) = cos 3t,R(s) = s s² + 9
Then C(s) = H(s). R(s)C(s) = s 1 = 1 s² + 9 s(s + 4) (s + 4)(s² + 9)
Using partial fraction, we haveC(s) = A + B + C s + 4 s - 3j s + 3j A = 1 
= 1 s² + 9 s=-4 25 B = 1 = 1 (s + 4)(s + 3j) s=-3j (-6j)(4 - 3j) C = 1 = 1 (s + 4)(s - 3j) s=-3j (-6j)(4 - 3j) Now, C(s) = 1 + 1 + 1 25(s + 4) (4 + 3j)(-6j)(s - 3j) (4 - 3j)(-6j)(s + 3j)
Inverse Laplace gives,C(t) = 1 e-4t + 1 [4e3jt - 4e-3jt - 3e3jt - 3e-3jt] 25 150j = 1 e-4t + 1 [8 sin 3t + 6 cos 3t] 25 150 = 1 e-4t + 1 4 sin 3t - 3 cos 3t 25 150 5 5 = 1 e-4t + 1 sin (3t + α) 25 15
where α = tan-1 (3/4)
At steady-state t → ∞and C(t) = 1 sin (3t + α) 15 gives A = 1 15 Correct Option: B
H(s) = 1 s(s + 4)
Input r(t) = cos 3t,R(s) = s s² + 9
Then C(s) = H(s). R(s)C(s) = s 1 = 1 s² + 9 s(s + 4) (s + 4)(s² + 9)
Using partial fraction, we haveC(s) = A + B + C s + 4 s - 3j s + 3j A = 1 = 1 s² + 9 s=-4 25 B = 1 = 1 (s + 4)(s + 3j) s=-3j (-6j)(4 - 3j) C = 1 = 1 (s + 4)(s - 3j) s=-3j (-6j)(4 - 3j) Now, C(s) = 1 + 1 + 1 25(s + 4) (4 + 3j)(-6j)(s - 3j) (4 - 3j)(-6j)(s + 3j)
Inverse Laplace gives,C(t) = 1 e-4t + 1 [4e3jt - 4e-3jt - 3e3jt - 3e-3jt] 25 150j = 1 e-4t + 1 [8 sin 3t + 6 cos 3t] 25 150 = 1 e-4t + 1 4 sin 3t - 3 cos 3t 25 150 5 5 = 1 e-4t + 1 sin (3t + α) 25 15
where α = tan-1 (3/4)
At steady-state t → ∞and C(t) = 1 sin (3t + α) 15 gives A = 1 15
- Let ƒ(t) be a continuous time signal and let F(ω) be its Fourier Transform defined by
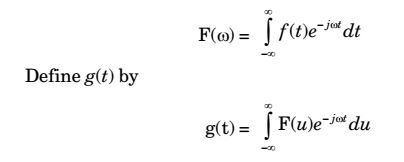
What is the relationship between ƒ(t) and g(t)?
-
View Hint View Answer Discuss in Forum
The relation of time domain with frequency domain is given by fourier transform.

Correct Option: B
The relation of time domain with frequency domain is given by fourier transform.

