Signals and systems electrical engineering miscellaneous
-
Let X(s) = 3s + 5 s² + 10s + 21
be the Laplace Transform of a signal x(t). Then, x(0+) is
-
View Hint View Answer Discuss in Forum
Correct Option: B
- Consider a signal defined by
x(t) = 
ej10t, for |t| ≤ 1 0 for |t| > 1
Its Fourier Transform is
-
View Hint View Answer Discuss in Forum
Correct Option: A
- The unit step response of a system with the transfer function
G(s) = 1 - 2s 1 + s
is given by which one of the following waveforms?
-
View Hint View Answer Discuss in Forum
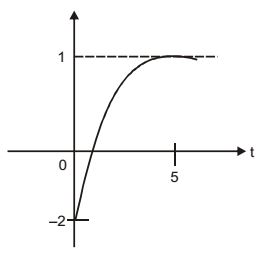
Y(s) = G(s) × U(s)∴ Y(s) = 1 - 2s . 1 (1 + s) s
Now using partial fraction concept∴ Y(s) = A + B (s) (s + 1)
A = 1, B = -3
∴ y(t) = u(t) – 3e–t u(t)
∴ y(t) = (1 – 3e – t) u(t)Correct Option: A
Y(s) = G(s) × U(s)∴ Y(s) = 1 - 2s . 1 (1 + s) s
Now using partial fraction concept∴ Y(s) = A + B (s) (s + 1)
A = 1, B = -3
∴ y(t) = u(t) – 3e–t u(t)
∴ y(t) = (1 – 3e – t) u(t)
- The z-Transform of a sequence x[n] is given as X(z) = 2z + 4 – 4/z + 3/z². If y[n] is the first difference of x[n], then Y(z) is given by
-
View Hint View Answer Discuss in Forum
y[n] is first difference of x[n]
∴ y[n] = x(n)– x(n – 1)
From z transform
∴ Y(z) = x(Z) (1 – z – 1) = X(z) – z–1X(z)
∴ Y(z) = [2z + 4 – 4z–1 + 3z–2] – [2 + 4z–1 – 4z–2]
= 2z + 4 – 4z–1 +3 z–2 – 2 – 4z–1 + 4z–2 – 3z–3
= 2z + 2 – 8z–1 + 7z – 2 – 3–3= 2z + 2 - 8 + 7 - 3 z z2 z3 Correct Option: A
y[n] is first difference of x[n]
∴ y[n] = x(n)– x(n – 1)
From z transform
∴ Y(z) = x(Z) (1 – z – 1) = X(z) – z–1X(z)
∴ Y(z) = [2z + 4 – 4z–1 + 3z–2] – [2 + 4z–1 – 4z–2]
= 2z + 4 – 4z–1 +3 z–2 – 2 – 4z–1 + 4z–2 – 3z–3
= 2z + 2 – 8z–1 + 7z – 2 – 3–3= 2z + 2 - 8 + 7 - 3 z z2 z3
- For linear time invariant systems, that are Bounded Input Bounded stable, which one of the following statement is TRUE?
-
View Hint View Answer Discuss in Forum
NA
Correct Option: D
NA

