Signals and systems electrical engineering miscellaneous
- The z - transform of a signal x[n]is given by
4z-3 + 3z-1 + 2 - 6z² + 2z³
It is applied to a system, with a transfer function H(z) = 3z–1 – 2.
Let the output be y(n). Which of the following is true?
-
View Hint View Answer Discuss in Forum
Given: X(z) = 4 z–3 + 3z–1 + 2 – 6z² + 2z³
H(z) = 3z–1 – 2,
output, y(n) = x(n) × h(n)
Taking z-tranform both sides,
Y(z) = H(z) X (z)
Y(z) = X(z) · H(z)
Y(z) = 12 z–4 – 8z–3 + 9z–2 – 4 – 18z + 18z² – 4z³
As, y[n] ≠ 0 for n < 0
So we see that, we have z, z², z³ which depends on future input but finite terms. So y(n) is non casual with finite support.Correct Option: A
Given: X(z) = 4 z–3 + 3z–1 + 2 – 6z² + 2z³
H(z) = 3z–1 – 2,
output, y(n) = x(n) × h(n)
Taking z-tranform both sides,
Y(z) = H(z) X (z)
Y(z) = X(z) · H(z)
Y(z) = 12 z–4 – 8z–3 + 9z–2 – 4 – 18z + 18z² – 4z³
As, y[n] ≠ 0 for n < 0
So we see that, we have z, z², z³ which depends on future input but finite terms. So y(n) is non casual with finite support.
- The system represented by the input-output relationship

-
View Hint View Answer Discuss in Forum
so that system is non-causal.Correct Option: B
so that system is non-causal.
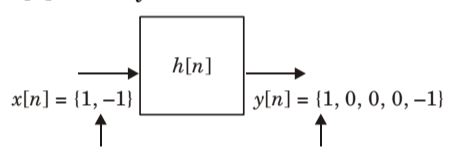
- Given the finite lengt h input x[n] and the corresponding finite length output y[n] of an LTI system as shown below. The impulse response h[n] of the system is
-
View Hint View Answer Discuss in Forum
x[n] = {1, – 1}, N = 2
y[n] = {1, 0, 0, 0, – 1}, N = 5
If P is t he number of elements in impulse response h[n], then,
⇒ N = M + P – 1
⇒ 5 = 2 + P – 1
⇒ P = 4
Let h[n] = {x1, x2, x3, x4}
then, y[n] = {x1, (x2 – x2), (x3 – x2), (x4 – x3), – x1}
Comparing with y[n] = {1, 0, 0, 0, – 1}
↑
We get x1 = 1, x2 = x1 = 1, x3 = x4 =1, x4 = x3 = 1
then, h[n] = {1, 1, 1, 1}Correct Option: C
x[n] = {1, – 1}, N = 2
y[n] = {1, 0, 0, 0, – 1}, N = 5
If P is t he number of elements in impulse response h[n], then,
⇒ N = M + P – 1
⇒ 5 = 2 + P – 1
⇒ P = 4
Let h[n] = {x1, x2, x3, x4}
then, y[n] = {x1, (x2 – x2), (x3 – x2), (x4 – x3), – x1}
Comparing with y[n] = {1, 0, 0, 0, – 1}
↑
We get x1 = 1, x2 = x1 = 1, x3 = x4 =1, x4 = x3 = 1
then, h[n] = {1, 1, 1, 1}
- A band-limited signal with a maximum frequency of 5 kHz is to be sampled. According to the sampling theorem, the sampling frequency in kHz which is not valid is
-
View Hint View Answer Discuss in Forum
As ƒmax = 5 kHz
ƒ sampling ≥ 2 ƒmax = 2 ƒmax = 10 kHz
Not 12, 15, 20 kHz a valid samply frequency so sampling frequency ƒs, such is not valid sampling frequency.Correct Option: A
As ƒmax = 5 kHz
ƒ sampling ≥ 2 ƒmax = 2 ƒmax = 10 kHz
Not 12, 15, 20 kHz a valid samply frequency so sampling frequency ƒs, such is not valid sampling frequency.
- A signal x(t) = sinc (αt) where α is a real constant

sin c (x) = sin (πx) 
πx
is the input to a Linear Time invariant system whose impulse response h(t) = sinc (βt) where β is a real constant.
If min (α , β) denotes the minimum of α and β, and similarly max (α , β) denotes the maximum of α and β, and K is a constant, which one of the following statements is true about the output of the system ?
-
View Hint View Answer Discuss in Forum
NA
Correct Option: A
NA

