Control systems miscellaneous
- In the unity feedback system shown below, the value of derivative feedback constant a, which will increase the damping ratio of the system to 0.7 is—

-
View Hint View Answer Discuss in Forum
On solving block 2
C(s) = 8/s(s+2) R′(s) 1+8/s(s+2).as C(s) = 8 R′(s) s2 + s (8a + 2)
Now, again simplifying block 1C(s) = 8/s2 + s(8a +2) R′(s) 8/s2 + s (8a + 2).1 + 1 = 8 s2 + (8a + 2)s + 8
C.E. is s2 + (2 + 8a) s + 8 = 0
on comparing with the standard equation
s2 + 2 ξ ωns + ωn2 = 0
ωn2 = 8 ⇒ ωn = 2√2
2 ξ ωn = 2 + 8a
orξ = 2 + 8a ⇒ 0·7 = 2 + 8a 2.ωn 2.2√2
on solving we get a = 0.245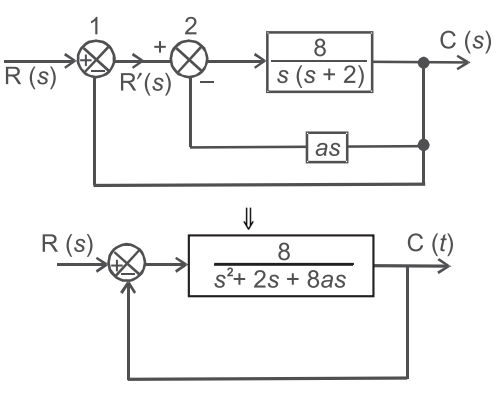
Correct Option: B
On solving block 2
C(s) = 8/s(s+2) R′(s) 1+8/s(s+2).as C(s) = 8 R′(s) s2 + s (8a + 2)
Now, again simplifying block 1C(s) = 8/s2 + s(8a +2) R′(s) 8/s2 + s (8a + 2).1 + 1 = 8 s2 + (8a + 2)s + 8
C.E. is s2 + (2 + 8a) s + 8 = 0
on comparing with the standard equation
s2 + 2 ξ ωns + ωn2 = 0
ωn2 = 8 ⇒ ωn = 2√2
2 ξ ωn = 2 + 8a
orξ = 2 + 8a ⇒ 0·7 = 2 + 8a 2.ωn 2.2√2
on solving we get a = 0.245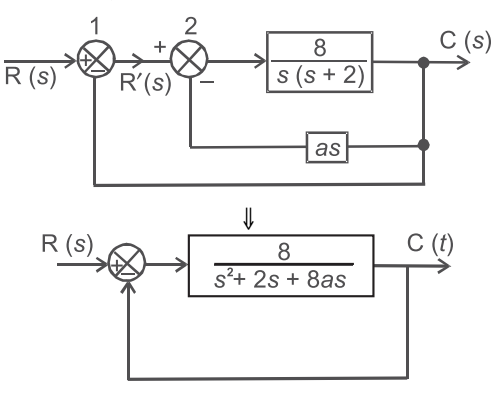
- The closed-loop transfer function of a control system is given by
C(s) = 2(s - 1) R(s) (s + 2)(s + 1)
For a unit step input the output is—
-
View Hint View Answer Discuss in Forum
Given r (t) = 1 then R (s) = 1/s
C(s) = 2 (s - 1) R(s) (s + 2)(s + 1) C(s) = R(s). 2 (s - 1) s(s + 2)(s + 1)
= 0.2 (s - 1) s(s + 2)(s + 1) C(s) = A + B + C s s + 1 s + 2 A = 2 (s + 1) |s=0 = -1 (s + 1)(s + 2) B = 2 (s - 1) |s=1 = 4 s(s + 2) C = 2 (s - 1) |s=2 = -3 s(s + 1)
on putting the value of A, B, C we getC(s) = -1 + 4 - 3 s s + 1 s + 2
Taking inverse Laplace transform, we get
C (t) = – 1 + 4e– t – 3e– 2tCorrect Option: A
Given r (t) = 1 then R (s) = 1/s
C(s) = 2 (s - 1) R(s) (s + 2)(s + 1) C(s) = R(s). 2 (s - 1) s(s + 2)(s + 1)
= 0.2 (s - 1) s(s + 2)(s + 1) C(s) = A + B + C s s + 1 s + 2 A = 2 (s + 1) |s=0 = -1 (s + 1)(s + 2) B = 2 (s - 1) |s=1 = 4 s(s + 2) C = 2 (s - 1) |s=2 = -3 s(s + 1)
on putting the value of A, B, C we getC(s) = -1 + 4 - 3 s s + 1 s + 2
Taking inverse Laplace transform, we get
C (t) = – 1 + 4e– t – 3e– 2t
- The overshoot of the system
16K s(s2 + 2s + 16
for a step input applied would be—
-
View Hint View Answer Discuss in Forum
Given C.E. = s2 + 2s + 16 = 0
NOTE : Here reader not confused with
C.E. = s (s2 + 2s + 16).
Because here s is the input term, on comparing this equation with the standard equation
s2 + 2ξ ωns + ωn2 = 0
we get
2 ξ ωn = 2, ωn 2 = 16 so ωn = 4.
ξ = 2 = 2 = 0.25 2ωn 2 × 4
so % Mp = e–π ξ√1 – ξ2 × 100
= e – 3·14 × 0·25 √1 – (.25)2
= 40%
Correct Option: B
Given C.E. = s2 + 2s + 16 = 0
NOTE : Here reader not confused with
C.E. = s (s2 + 2s + 16).
Because here s is the input term, on comparing this equation with the standard equation
s2 + 2ξ ωns + ωn2 = 0
we get
2 ξ ωn = 2, ωn 2 = 16 so ωn = 4.
ξ = 2 = 2 = 0.25 2ωn 2 × 4
so % Mp = e–π ξ√1 – ξ2 × 100
= e – 3·14 × 0·25 √1 – (.25)2
= 40%
- The position and acceleration error coefficients for the open-loop transfer function
G(s) = K s2(s + 10) (s + 100)
respectively are—
-
View Hint View Answer Discuss in Forum
Kp = s → 0Lim
G (s) = s → 0Lim K = ∞ s2(s + 10)(s + 100)
Ka = s → 0Lim s2 G(s)= s → 0Lim s2·K = 0.001 K, s2(s + 10)(s + 100)
or
K/1000Correct Option: D
Kp = s → 0Lim
G (s) = s → 0Lim K = ∞ s2(s + 10)(s + 100)
Ka = s → 0Lim s2 G(s)= s → 0Lim s2·K = 0.001 K, s2(s + 10)(s + 100)
or
K/1000
- The position and velocity error coefficients for the system of transfer function
G(s) = 50 (1 + 0.1s) (1 + 2s)
respectively are—
-
View Hint View Answer Discuss in Forum
Kp = s → 0Lim G (s) = s → 0Lim 50 = 50 (1 + 0·1s)(1 + 2s)
Kv = s → 0Lim sG (s)= s → 0Lim s.50 = 0 (1 + 0·1s)(1 + 2s)
Correct Option: C
Kp = s → 0Lim G (s) = s → 0Lim 50 = 50 (1 + 0·1s)(1 + 2s)
Kv = s → 0Lim sG (s)= s → 0Lim s.50 = 0 (1 + 0·1s)(1 + 2s)

