Control systems miscellaneous
- Given: KK1 = 99; s = j1 rad/s, the sensitivity of the closed-loop system (shown in the figure) to variation in parameter K is approximately—
-
View Hint View Answer Discuss in Forum
Given, K K1 = 99
s = j1 it means ω = 1 rad/sec.
We have to calculate sensitivity of closed loop system to variation in parameter K i.e.,SMK = ∂M/M ∂K/K = K × ∂M M ∂K
orSMK = K ∂M G ∂K
Now,M = G(s) = K/(10s + 1) 1 + G(s)H(s) (1 + KKt)/(10s + 1)
orM = K (10s + 1+ KKt)
∂M = (10s + 1 + kkt)(∂/∂K).K - K (∂/∂K)(10s + 1 + kk1) ∂K (10s + 1 + KKt)
or∂M = 10s + 1 + kkt - kkt ∂K (10s + 1 + KKt)2
or∂M = 10s + 1 ∂K (10s + 1 + KKt)2 and SMK = K × (10s + 1) K/(10s + 1 + kkt) (10s + 1 + kkt)2
oror SMK = (10s + 1) (10s + 1 + kkt) or SMK = (10s + 1) 10s + 1 + 99 SMK = (10s + 1) 10s (s + 10)
orSMK = √100ω2 + 1 10√102ω2
orSMK = √100 + 1 10√100 + 1
or SMK = 0·1
Hence alternative (B) is the correct choice.Correct Option: B
Given, K K1 = 99
s = j1 it means ω = 1 rad/sec.
We have to calculate sensitivity of closed loop system to variation in parameter K i.e.,SMK = ∂M/M ∂K/K = K × ∂M M ∂K
orSMK = K ∂M G ∂K
Now,M = G(s) = K/(10s + 1) 1 + G(s)H(s) (1 + KKt)/(10s + 1)
orM = K (10s + 1+ KKt)
∂M = (10s + 1 + kkt)(∂/∂K).K - K (∂/∂K)(10s + 1 + kk1) ∂K (10s + 1 + KKt)
or∂M = 10s + 1 + kkt - kkt ∂K (10s + 1 + KKt)2
or∂M = 10s + 1 ∂K (10s + 1 + KKt)2 and SMK = K × (10s + 1) K/(10s + 1 + kkt) (10s + 1 + kkt)2
oror SMK = (10s + 1) (10s + 1 + kkt) or SMK = (10s + 1) 10s + 1 + 99 SMK = (10s + 1) 10s (s + 10)
orSMK = √100ω2 + 1 10√102ω2
orSMK = √100 + 1 10√100 + 1
or SMK = 0·1
Hence alternative (B) is the correct choice.
- The state representation of a second order system is
x1 = – x1 u, x2 = x1 – 2x2 + u
Consider the following statements regarding the above system:
1. The system is completely state controllable.
2. If x1 is the output, then the system is completely output controllable.
3. If x2 is the output, then the system is completely output controllable. Of these statements—
-
View Hint View Answer Discuss in Forum
The given state equation can be written as

x1 
= -1 0 x1 + 1 u x2 1 -2 x2 1
The controllability matrix is
QC = [B: AB] ≠ 0
B = [1 1]AB = -1 0 1 = 1 1 -2 1 1 AB = -1 0 1 = -1 1 -2 1 -1 Qc = 1 -1 1 -1
Since determinant QC = 0, the system is not state controllable. Hence statement (C) is correct.Correct Option: C
The given state equation can be written as
x1 = -1 0 x1 + 1 u x2 1 -2 x2 1
The controllability matrix is
QC = [B: AB] ≠ 0
B = [1 1]AB = -1 0 1 = 1 1 -2 1 1 AB = -1 0 1 = -1 1 -2 1 -1 Qc = 1 -1 1 -1
Since determinant QC = 0, the system is not state controllable. Hence statement (C) is correct.
- A system is described by the state equation X· = AX + BU. The output is given by Y = CX, where
A = -4 -1 , B = 1 , C = [1 0] 3 -1 1
The transfer function G(s) of the system is—
-
View Hint View Answer Discuss in Forum
The transfer function G(s) of the system is given by relation
G(s) = C(SI – A)–1 B + D
where given,A = = -4 -1 -1 3 B = 1 1
C = [1 0]
D = 0
and I is the identity matrix of 2 × 2. Now(sI – A) = s 0 - -4 -1 0 s 3 -1 (sI – A) = s + 1 1 - 3 s + 1 s + 4 1 (sl -A)-1 = +3 s + 1 (s + 4) (s + 1) + 3 s + 1 - 1 + 3 s + 4 s2 + 5s + 7 s + 1 - 1 G(s) = [1 0] + 3 s + 4 1 s2 + 5s + 7 G(s) = [s + 1 - 1] 1 = s + 1 - 1 s2+ 5s + 7 1 s2+ 5s + 7 G(s) = s s2+ 5s + 7
Hence alternative (A) is the correct choice.Correct Option: A
The transfer function G(s) of the system is given by relation
G(s) = C(SI – A)–1 B + D
where given,A = = -4 -1 -1 3 B = 1 1
C = [1 0]
D = 0
and I is the identity matrix of 2 × 2. Now(sI – A) = s 0 - -4 -1 0 s 3 -1 (sI – A) = s + 1 1 - 3 s + 1 s + 4 1 (sl -A)-1 = +3 s + 1 (s + 4) (s + 1) + 3 s + 1 - 1 + 3 s + 4 s2 + 5s + 7 s + 1 - 1 G(s) = [1 0] + 3 s + 4 1 s2 + 5s + 7 G(s) = [s + 1 - 1] 1 = s + 1 - 1 s2+ 5s + 7 1 s2+ 5s + 7 G(s) = s s2+ 5s + 7
Hence alternative (A) is the correct choice.
- Match the system open-loop transfer functions given in List-I with the steady-state errors produced a unit ramp input. Select the correct answer using the codes given below the lists:
List-I List-II A. 30/s2 + 6s + 9 1. Zero B. 30/s2 + 6s 2. 0.2 C.
30/s2 + 9s3. 0.3 D. s + 1/s2 4. infinity Codes
-
View Hint View Answer Discuss in Forum
Steady state error, ess = s → 0 lim sE(s)
where,
E(s) = 1 R(s) 1 + G(s) H(s)
orE(s) = R(s) 1 + G(s) H(s) ess = s → 0lim s. R(s) 1 + G(s) H(s)
given, r(t) = tu(t)
or
R(s) = 1/s2
Now,
(a) When,G(s) H(s) = 30 s2 + 6s + 9 ess =s → 0lim 1/s2 · s 1 + {30 (s2 + 6s + 90)} =s → 0lim (s2 + 6s + 90)s = ∞ s2(s2 + 6s + 120)
(b) When,
G(s) H(s) = 30/s2 + 6sess =s → 0lim (1/s2)s 1 + (30/s2 + 6s) =s → 0lim (s2 +6)s s2(s2 + 6s + 30)
= 6/30 = 0·2
(c) When,
G(s) H(s) = 30/s2 + 9sess =s → 0lim (1/s2)s 1 + (30/s2 + 9s) =s → 0lim (s2 +9)s s2(s2 + 9s + 30)
= 9/30 = 0·3G(s) H(s) = s + 1 s2 ess =s → 0lim s(1/s2) = s = 0 1 + (s + 1)/s2 s2 + s +1
Hence alternative (D) is the correct choice.Correct Option: B
Steady state error, ess = s → 0 lim sE(s)
where,
E(s) = 1 R(s) 1 + G(s) H(s)
orE(s) = R(s) 1 + G(s) H(s) ess = s → 0lim s. R(s) 1 + G(s) H(s)
given, r(t) = tu(t)
or
R(s) = 1/s2
Now,
(a) When,G(s) H(s) = 30 s2 + 6s + 9 ess =s → 0lim 1/s2 · s 1 + {30 (s2 + 6s + 90)} =s → 0lim (s2 + 6s + 90)s = ∞ s2(s2 + 6s + 120)
(b) When,
G(s) H(s) = 30/s2 + 6sess =s → 0lim (1/s2)s 1 + (30/s2 + 6s) =s → 0lim (s2 +6)s s2(s2 + 6s + 30)
= 6/30 = 0·2
(c) When,
G(s) H(s) = 30/s2 + 9sess =s → 0lim (1/s2)s 1 + (30/s2 + 9s) =s → 0lim (s2 +9)s s2(s2 + 9s + 30)
= 9/30 = 0·3G(s) H(s) = s + 1 s2 ess =s → 0lim s(1/s2) = s = 0 1 + (s + 1)/s2 s2 + s +1
Hence alternative (D) is the correct choice.
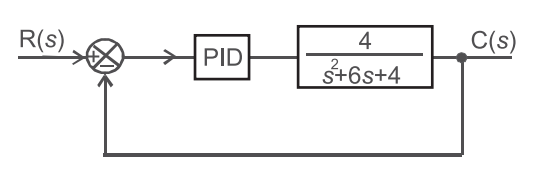
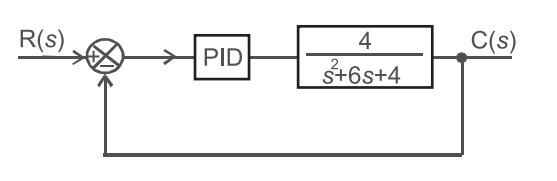
- The block schematic uses PID controller to design a system whose characteristics equation has real root at – 10 and ξ = 0.8 and ωn = 2 rad/sec. Find the value of KP, KI and Kd –

-
View Hint View Answer Discuss in Forum
Given G(s) = 4 s2 + 6s + 4 PID → KP + KI + Kd.s s
From figureC(s) = KP +(KI/s)+ Kd.s R(s) s2+ 6s + 4(KP +(KI/s)+ Kd.s) + 4
orC(s) = (KP +(KI/s)+ Kd.s)s R(s) s3+ 6s2 + 4KPs + 4KI + 4Kd.s2 + 4s
orC(s) = (KP +(KI/s)+ Kd.s)s R(s) s3+ (6s + 4KP)s2 + 4(1 + Kd)s + 4KI
C.E. s3 + (6 + 4Kd)s2 + 4(1 + Kp)s + 4KI = 0 …....(i)
As given that C.E. has real root at – 10,
i.e., (s + 10) (s2 + 2ξωn s + ω2n) = 0
or
s3 + (2ξωn + 10)s2 + (ω2n + 20ξωn)s + 10ω2n = 0 . . .…(ii)
on comparing equation (i) with the standard equation of 3rd order, we get
6 + 4Kd = 2ξωn + 10
on putting
ξ = 0·8
and
ωn = 2 rad/secKd = 2 × 0·8 × 2 + 10 – 6 = 1·8 4
and 4(1 + KP) = ω2n + 20ξωnKP = 22 + 20 × 0·8 × 2 – 1 = 8 4
and
4KI = 10ω2n<.sub>
orKI = 10 × 22 = 10 4
Hence alternative (A) is the correct choice.
Correct Option: A
Given G(s) = 4 s2 + 6s + 4 PID → KP + KI + Kd.s s
From figureC(s) = KP +(KI/s)+ Kd.s R(s) s2+ 6s + 4(KP +(KI/s)+ Kd.s) + 4
orC(s) = (KP +(KI/s)+ Kd.s)s R(s) s3+ 6s2 + 4KPs + 4KI + 4Kd.s2 + 4s
orC(s) = (KP +(KI/s)+ Kd.s)s R(s) s3+ (6s + 4KP)s2 + 4(1 + Kd)s + 4KI
C.E. s3 + (6 + 4Kd)s2 + 4(1 + Kp)s + 4KI = 0 …....(i)
As given that C.E. has real root at – 10,
i.e., (s + 10) (s2 + 2ξωn s + ω2n) = 0
or
s3 + (2ξωn + 10)s2 + (ω2n + 20ξωn)s + 10ω2n = 0 . . .…(ii)
on comparing equation (i) with the standard equation of 3rd order, we get
6 + 4Kd = 2ξωn + 10
on putting
ξ = 0·8
and
ωn = 2 rad/secKd = 2 × 0·8 × 2 + 10 – 6 = 1·8 4
and 4(1 + KP) = ω2n + 20ξωnKP = 22 + 20 × 0·8 × 2 – 1 = 8 4
and
4KI = 10ω2n<.sub>
orKI = 10 × 22 = 10 4
Hence alternative (A) is the correct choice.