Control systems miscellaneous
- For the transfer function
G(s) H(s) = 1 s(s + 1) (s + 0·5)
the phase cross-over frequency is—
-
View Hint View Answer Discuss in Forum
Phase cross-over frequency for the given transfer function
G(s)H(s) = 1 s(s + 1)(s + 0·5)
∠G(s H(s) = – 90° – tan–1(ω/1) – tan–1(ω/0.5)
– 180° = – 90° – tan–1 ω – tan–1 (2ω)or 90° = tan–1 
ω + 2ω 
⎪at ω = ωP 1 – ω.2ω or tan 90° = 3ω ⎪at ω = ωP 1 – 2ω2 or 1 = 3ω ⎪at ω = ωP 0 1 – 2ω2
or 1 – 2 ω2P = 0
or ωP = 1/√2
ωP = 0.707 rad/sec.Correct Option: B
Phase cross-over frequency for the given transfer function
G(s)H(s) = 1 s(s + 1)(s + 0·5)
∠G(s H(s) = – 90° – tan–1(ω/1) – tan–1(ω/0.5)
– 180° = – 90° – tan–1 ω – tan–1 (2ω)or 90° = tan–1 ω + 2ω ⎪at ω = ωP 1 – ω.2ω or tan 90° = 3ω ⎪at ω = ωP 1 – 2ω2 or 1 = 3ω ⎪at ω = ωP 0 1 – 2ω2
or 1 – 2 ω2P = 0
or ωP = 1/√2
ωP = 0.707 rad/sec.
- Consider the system
X(t) = 
1 1 
X(t) + b1 u(t) 0 -1 b2
c (t) = d1 d2 X (t)
The conditions for complete state controllability and complete observability is—
-
View Hint View Answer Discuss in Forum
Given
A = 1 1 , B = b1 0 1 b2
C=[d1d2]
For observability
Q0 = [CT: AT CT] ≠ 0
where,CT = b1 b2 AT = 1 0 1 1 AT CT = 1 0 1 1 AT CT = 1 0 d1 = d1 1 1 d2 d1 + d2
Now,Q0 = d1 d1 ≠ 0 d2 d1 + d2
or
d1(d1 + d2) - d1 d22 ≠ ≠ 0
or
d12 + d1d2 ≠ 0
or
d12 ≠ 0
or
d1 ≠ 0
For controllability
θC = [B: A B] ≠ 0
where,B = d1 d2 AB = 1 1 d1 = d1 + d2 0 1 d2 d2
orQc = d1 d1 + d2 d2 d2
or
b1 b2 – b2 (b1 + b2) ≠ 0
or
b1 b2 – b22 – b1 b2 ≠ 0
or
– b22 ≠ 0
or
b2 ≠ 0
Finally we conclude that only option (A) fulfils this condition.Correct Option: A
Given
A = 1 1 , B = b1 0 1 b2
C=[d1d2]
For observability
Q0 = [CT: AT CT] ≠ 0
where,CT = b1 b2 AT = 1 0 1 1 AT CT = 1 0 1 1 AT CT = 1 0 d1 = d1 1 1 d2 d1 + d2
Now,Q0 = d1 d1 ≠ 0 d2 d1 + d2
or
d1(d1 + d2) - d1 d22 ≠ ≠ 0
or
d12 + d1d2 ≠ 0
or
d12 ≠ 0
or
d1 ≠ 0
For controllability
θC = [B: A B] ≠ 0
where,B = d1 d2 AB = 1 1 d1 = d1 + d2 0 1 d2 d2
orQc = d1 d1 + d2 d2 d2
or
b1 b2 – b2 (b1 + b2) ≠ 0
or
b1 b2 – b22 – b1 b2 ≠ 0
or
– b22 ≠ 0
or
b2 ≠ 0
Finally we conclude that only option (A) fulfils this condition.
- The value of A matrix in X′ = AX for the system described by the differential equation ÿ + 2y · + 3y = 0 is—
-
View Hint View Answer Discuss in Forum
Try yourself
Correct Option: D
Try yourself
- The state and output equation of a system are as under state equation:
x1 (t) = 0 1 x1 (t) + 0 u(t) x2 (t) -1 -2 x2 (t) 1
AndC(t) =[1 1] x1 (t) x2 (t)
The system is—
-
View Hint View Answer Discuss in Forum
Given state equation:
x1 (t) = 0 1 x1 (t) + 0 u(t) x2 (t) -1 -2 x2 (t) 1 C(t) = [1 1] x1 (t) x2 (t)
Here,A = 0 1 -1 -2 B = 0 1
C = [1 1]
Check for controllabilityAB = 0 1 0 = 1 -1 -2 1 -2
∴ QC = [B: AB] = – 1, which is non-singular.
Hence, the state equation is controllable.
Check for observability :A = 0 1 -1 -2
thenAT = 0 -1 1 -2
C = [1 1]
thenCT = 1 1
Now,ATCT = 0 -1 1 1 -2 1 = -1 -1
θ0 = [CT : AT CT]ATCT = 1 -1 1 -1
= 0 i.e., singular.
Hence given system equation is not observable.
Therefore alternative (B) is the correct choice.Correct Option: B
Given state equation:
x1 (t) = 0 1 x1 (t) + 0 u(t) x2 (t) -1 -2 x2 (t) 1 C(t) = [1 1] x1 (t) x2 (t)
Here,A = 0 1 -1 -2 B = 0 1
C = [1 1]
Check for controllabilityAB = 0 1 0 = 1 -1 -2 1 -2
∴ QC = [B: AB] = – 1, which is non-singular.
Hence, the state equation is controllable.
Check for observability :A = 0 1 -1 -2
thenAT = 0 -1 1 -2
C = [1 1]
thenCT = 1 1
Now,ATCT = 0 -1 1 1 -2 1 = -1 -1
θ0 = [CT : AT CT]ATCT = 1 -1 1 -1
= 0 i.e., singular.
Hence given system equation is not observable.
Therefore alternative (B) is the correct choice.
- Obtain the transfer function for the response curve shown below—

-
View Hint View Answer Discuss in Forum
From figure
20 log10 K = 12
K = 1012/20
or K = 3·98 ≈ 4
one pole atω = 100
i.e., (1 + sT),
where
T0 = 1/ω = 1/100
(1 + 0·01s)
Hence transfer function, G(s) H(s) = 4/1 + 0·01s
Hence alternative (C) is the correct choice.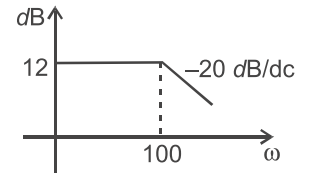
Correct Option: C
From figure
20 log10 K = 12
K = 1012/20
or K = 3·98 ≈ 4
one pole atω = 100
i.e., (1 + sT),
where
T0 = 1/ω = 1/100
(1 + 0·01s)
Hence transfer function, G(s) H(s) = 4/1 + 0·01s
Hence alternative (C) is the correct choice.

