Control systems miscellaneous
- The 3-dB bandwidth of a typical second-order system with the transfer function
C(s) = ω2n R(s) s2 + 2ξ ωns + ω2n
is given by—
-
View Hint View Answer Discuss in Forum
Refer synopsis.
Correct Option: C
Refer synopsis.
- Two identical first-order systems have been cascaded non-interactively. The unit step response of the systems will be—
-
View Hint View Answer Discuss in Forum
According to the equation, two identical first order systems have been cascaded non-interactively
i.e.,
(1 + sT) (1 + sT)
C.E. (1 + sT) (1 + sT) = 0
⇒ s2T2 + 2sT + 1 = 0⇒ s2 + 2s + 1 = 0 T T2
2ξ ωn = 2/T
ωn2 = 1/T2
or
ωn = 1/Tξ = 1 = 1 = 1 Tωn T(1/T)
Hence alternative (D) is the correct choice.Correct Option: D
According to the equation, two identical first order systems have been cascaded non-interactively
i.e.,
(1 + sT) (1 + sT)
C.E. (1 + sT) (1 + sT) = 0
⇒ s2T2 + 2sT + 1 = 0⇒ s2 + 2s + 1 = 0 T T2
2ξ ωn = 2/T
ωn2 = 1/T2
or
ωn = 1/Tξ = 1 = 1 = 1 Tωn T(1/T)
Hence alternative (D) is the correct choice.
- An integral controller is used to improve the transient response of a first order system. If G (s) = 1/1 + s and the system is operated in closed-loop with unity feedback, what is the value of Ti if integral controller transfer function is 1/Ti s to provide damping ratio of 0.5?
-
View Hint View Answer Discuss in Forum
According to question C.E. of the system 1 + G(s) H(s) = 0
1 + 1 × 1 = 0 Tis 1 + s
Tis + Ti s2 + 1 = 0
or
s2 + s + 1/Ti = 0 …(i)
on comparing equation (i) with the standard equation
s2 + 2ξωn s + ωn2 = 0
2ξωn = 1
and
ωn2 = 1/Ti
or
ωn = 1/√T2
or
ξ = 1/2ωn
or
ξ = √Ti/2
or
0·5 = √T1/2
or
Ti = 1

Correct Option: C
According to question C.E. of the system 1 + G(s) H(s) = 0
1 + 1 × 1 = 0 Tis 1 + s
Tis + Ti s2 + 1 = 0
or
s2 + s + 1/Ti = 0 …(i)
on comparing equation (i) with the standard equation
s2 + 2ξωn s + ωn2 = 0
2ξωn = 1
and
ωn2 = 1/Ti
or
ωn = 1/√T2
or
ξ = 1/2ωn
or
ξ = √Ti/2
or
0·5 = √T1/2
or
Ti = 1

- A control system is as shown in the given figure. The maximum value of gain K for which the system is stable is—

-
View Hint View Answer Discuss in Forum
C(s) = K.(1/s3 + 3s2 + 2s + 1) R(s) 1 + (1/s3 + 3s2 + 2s + 1)× 1
and C.E = 1 + G(s) H(s)⇒ + 1 K . 1 = 0 s3 + 3s2 + 2s + 1
⇒ s3 + 3s2 + 2s + 1 K = 0
The Hurwitz criterion can be given as
s3 1 2
s2 3 1 + K
s3 6 – (1 + K)/3 0
s0 1 + K 0
for the system to be stable6 – (1 + K) ≥ 0 3
and
1 + K ≥ 0
6 ≥ 1 + K
or
1 + K ≤ 6
or
K ≤ 5
Kmax = 5
Correct Option: D
C(s) = K.(1/s3 + 3s2 + 2s + 1) R(s) 1 + (1/s3 + 3s2 + 2s + 1)× 1
and C.E = 1 + G(s) H(s)⇒ + 1 K . 1 = 0 s3 + 3s2 + 2s + 1
⇒ s3 + 3s2 + 2s + 1 K = 0
The Hurwitz criterion can be given as
s3 1 2
s2 3 1 + K
s3 6 – (1 + K)/3 0
s0 1 + K 0
for the system to be stable6 – (1 + K) ≥ 0 3
and
1 + K ≥ 0
6 ≥ 1 + K
or
1 + K ≤ 6
or
K ≤ 5
Kmax = 5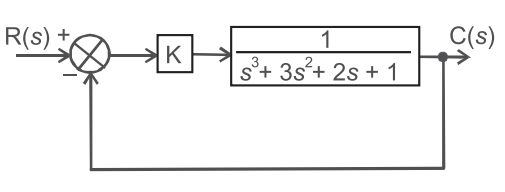
- The open loop transfer function of a unity feedback control system is given by:
G(s) = K s(s + 1)
If the gain K is increased to infinity, then the damping ratio will tend to become—
-
View Hint View Answer Discuss in Forum
Given G(s) = K/s(s + 1)
and
H(s) = 1
C.E. 1 + G(s) H(s) = 01 + K · 1 = 0 s(s + 1)
s2 + s + K = 0 …(i)
on comparing equation (i) with the standard equation
s2 + 2ξωn s + ωn2 = 0,
we get
ωn2 = K
⇒ ωn = ± √K
2ξωn = 1
or ξ = 1 2√K
Now, as K → ∞, then ξ → 0.
Hence alternative (C) is the correct choice.Correct Option: C
Given G(s) = K/s(s + 1)
and
H(s) = 1
C.E. 1 + G(s) H(s) = 01 + K · 1 = 0 s(s + 1)
s2 + s + K = 0 …(i)
on comparing equation (i) with the standard equation
s2 + 2ξωn s + ωn2 = 0,
we get
ωn2 = K
⇒ ωn = ± √K
2ξωn = 1
or ξ = 1 2√K
Now, as K → ∞, then ξ → 0.
Hence alternative (C) is the correct choice.

