-
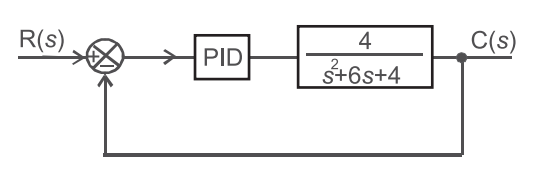
The block schematic uses PID controller to design a system whose characteristics equation has real root at – 10 and ξ = 0.8 and ωn = 2 rad/sec. Find the value of KP, KI and Kd –

-
- Kd = 1.8, KP = 8, KI = 10
- Kd = 1.8, KP = 4, KI = 5
- Kd = 3.6, KP = 8, KI = 20
- Kd = 1.8, KP = 8, KI = 20
- Kd = 1.8, KP = 8, KI = 10
Correct Option: A
| Given G(s) = | |
| s2 + 6s + 4 |
| PID → KP + | + Kd.s | |
| s |
From figure
| = | ||
| R(s) | s2+ 6s + 4(KP +(KI/s)+ Kd.s) + 4 |
or
| = | ||
| R(s) | s3+ 6s2 + 4KPs + 4KI + 4Kd.s2 + 4s |
or
| = | ||
| R(s) | s3+ (6s + 4KP)s2 + 4(1 + Kd)s + 4KI |
C.E. s3 + (6 + 4Kd)s2 + 4(1 + Kp)s + 4KI = 0 …....(i)
As given that C.E. has real root at – 10,
i.e., (s + 10) (s2 + 2ξωn s + ω2n) = 0
or
s3 + (2ξωn + 10)s2 + (ω2n + 20ξωn)s + 10ω2n = 0 . . .…(ii)
on comparing equation (i) with the standard equation of 3rd order, we get
6 + 4Kd = 2ξωn + 10
on putting
ξ = 0·8
and
ωn = 2 rad/sec
| Kd = | = 1·8 | |
| 4 |
and 4(1 + KP) = ω2n + 20ξωn
| KP = | – 1 = 8 | |
| 4 |
and
4KI = 10ω2n<.sub>
or
| KI = | = 10 | |
| 4 |
Hence alternative (A) is the correct choice.