Control systems miscellaneous
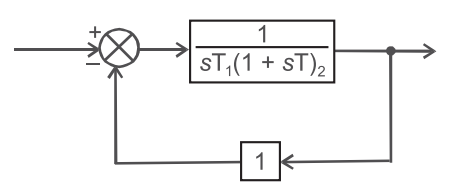
- A closed-loop system is shown below. When will the system is very much underdamped?
-
View Hint View Answer Discuss in Forum
From figure C.E. ⇒ 1 + G(s) H(s) = 0
1 + 1 . 1 = 0 sT1(1 + sT2)
or
sT1 + sT1T2 + 1 = 0s2 + s + 1 = 0......…(i) T2 T1T2
on comparing equation (i) with the standard equation
s2 + 2ξωns + ωn2 = 0,
we get
2ξωn = 1/T2
ωn2 = 1/T1T2
or
ωn = 1/√T1T2
For system to be strong underdamped
ξ << 1
or
√T1T2/2T2
<< 1 or T1 << T2 (with ξ < 0·5)
Hence alternative (A) is the most correct choice.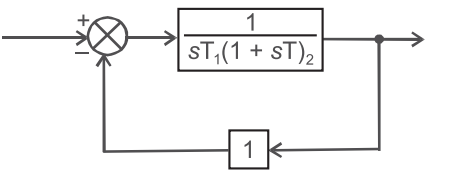
Correct Option: A
From figure C.E. ⇒ 1 + G(s) H(s) = 0
1 + 1 . 1 = 0 sT1(1 + sT2)
or
sT1 + sT1T2 + 1 = 0s2 + s + 1 = 0......…(i) T2 T1T2
on comparing equation (i) with the standard equation
s2 + 2ξωns + ωn2 = 0,
we get
2ξωn = 1/T2
ωn2 = 1/T1T2
or
ωn = 1/√T1T2
For system to be strong underdamped
ξ << 1
or
√T1T2/2T2
<< 1 or T1 << T2 (with ξ < 0·5)
Hence alternative (A) is the most correct choice.
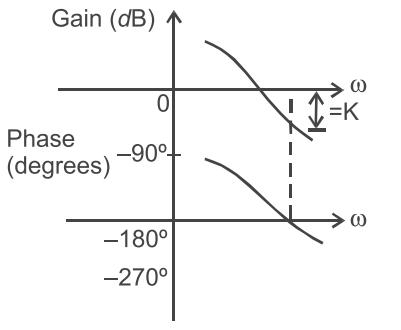
- Bode plots of an open-loop transfer function of a control system are shown in the given figure. The gain margin of the system is—
-
View Hint View Answer Discuss in Forum
Assuming constant multiple in the open-loop transfer function to be 1, the gain margin
= K (As clearly seen from the given figure)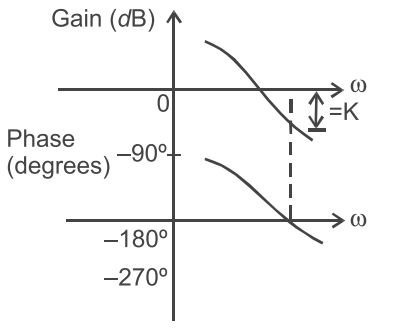
Correct Option: A
Assuming constant multiple in the open-loop transfer function to be 1, the gain margin
= K (As clearly seen from the given figure)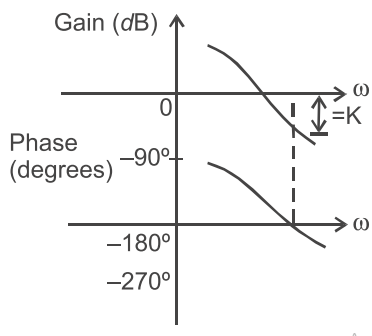
- The first two rows of Routh’s tabulation of a fourth-order system are
s4 1 10 5
s3 2 20
The number of roots of the system lying on the right half of s-plane is—
-
View Hint View Answer Discuss in Forum
where ε is very large number approaching infinity, we see that in the first column of the table, there are two sign changes. Therefore, the number of roots of the changed equation of the system lying in the right half of s-plane is 2.
Hence alternative (B) is the correct choice.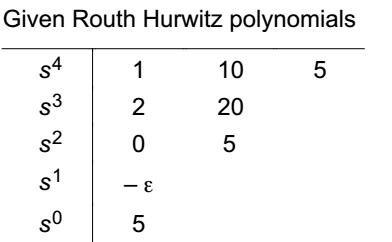
Correct Option: B
where ε is very large number approaching infinity, we see that in the first column of the table, there are two sign changes. Therefore, the number of roots of the changed equation of the system lying in the right half of s-plane is 2.
Hence alternative (B) is the correct choice.
- A process with open-loop model
G(s) = Ke–sT4 τs + 1
is controlled by a PID controller. For this process—
-
View Hint View Answer Discuss in Forum
(B, C) As we have discussed in the synopsis that derivative mode improves transient response while integral mode improves the steady-state performance.
Hence alternative (B) and (C) both are the correct choice.Correct Option: E
(B, C) As we have discussed in the synopsis that derivative mode improves transient response while integral mode improves the steady-state performance.
Hence alternative (B) and (C) both are the correct choice.
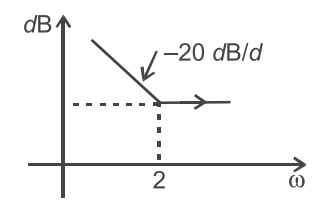
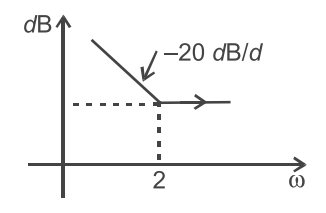
- Bode plot of a stable system is shown in figure below. The transfer function of the system is—
-
View Hint View Answer Discuss in Forum
From figure
ωc = 2
Since after decreasing from 20 dB/d gain becomes cons-tant it means one zero i.e., (1 + sT)
where,
T = 1/ωn
= 1/2 = 0·5
Transfer function = K(1 + 0·5s)/s
20 log10 K/s| s = 2 = 6
or
K/s| s = 2 = 106/20 = 2
or
K = 2s = 2 × 2
K=4
Now,
T.F. = 4(1 + 0·5s)/s
Hence alternative (B) is the correct choice.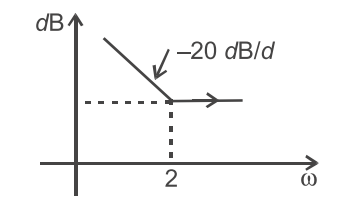
Correct Option: B
From figure
ωc = 2
Since after decreasing from 20 dB/d gain becomes cons-tant it means one zero i.e., (1 + sT)
where,
T = 1/ωn
= 1/2 = 0·5
Transfer function = K(1 + 0·5s)/s
20 log10 K/s| s = 2 = 6
or
K/s| s = 2 = 106/20 = 2
or
K = 2s = 2 × 2
K=4
Now,
T.F. = 4(1 + 0·5s)/s
Hence alternative (B) is the correct choice.