Engineering Mechanics Miscellaneous
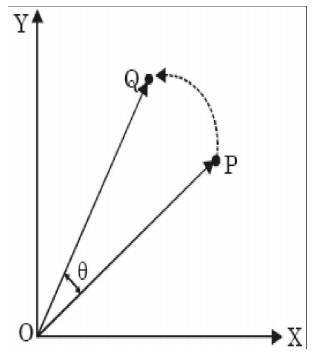
- The position vector OP of point P(20, 10) is rotated anti-clockwise in X-Y plane by an angle θ = 30° a such that point P occupies position Q, as shown in the figure. The coordinates (x, y) of Q are
-
View Hint View Answer Discuss in Forum
Let Co-ordinates of Q are (x', y') and rotation about x-y plane anti clockwise.

X' 
= cosθ -sinθ X Y' sinθ cosθ Y X' = cos30 -sin30 20 Y' sin30 cos30 10 = 0.866 -0.5 20 0.5 0.866 10 X' = 0.866 × 20 -0.5 × 10 = 12.32 Y' 0.5 × 20 0.866 × 10 18.66
(x', y') = (12.32, 18.66)Correct Option: A
Let Co-ordinates of Q are (x', y') and rotation about x-y plane anti clockwise.
X' = cosθ -sinθ X Y' sinθ cosθ Y X' = cos30 -sin30 20 Y' sin30 cos30 10 = 0.866 -0.5 20 0.5 0.866 10 X' = 0.866 × 20 -0.5 × 10 = 12.32 Y' 0.5 × 20 0.866 × 10 18.66
(x', y') = (12.32, 18.66)
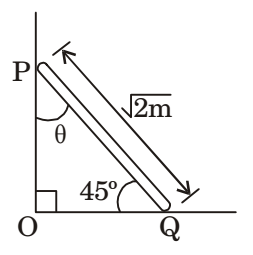
- The rod PQ of length L = 2 m and uniformly distributed mass of M = 10 kg, is released from rest at the position shown in the figure. The ends slide along the friction less faces OP and OQ. Assume acceleration due to gravity, g = 10 m/s2. The mass moment of inertia of the rod about its centre of mass and an axis perpendicular to the plane of the figure is (ML2/12). At this instant, the magnitude of angular acceleration (in radian/s2) of the rod is ______.'
-
View Hint View Answer Discuss in Forum
TI-C = TI-C⇒ Mgx L cos45° = ICM + ML2 α 2 4 ⇒ Mg L cos45° = ML2 + ML2 α 2 12 4 α = 3g cos45° 2L α = 30 + 1 
∴ g = 10 m 
2 × V2 V2 s2 α = 7.5 rad s2 Correct Option: A
TI-C = TI-C⇒ Mgx L cos45° = ICM + ML2 α 2 4 ⇒ Mg L cos45° = ML2 + ML2 α 2 12 4 α = 3g cos45° 2L α = 30 + 1 ∴ g = 10 m 2 × V2 V2 s2 α = 7.5 rad s2
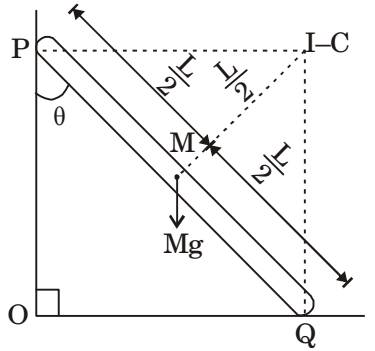
- A mobile phone has a small motor with an eccentric mass used for vibrator mode. The location of the eccentric mass on motor with respect to center of gravity (CG) of the mobile and the rest of the dimension of the mobile phone are shown. The mobile is kept on a flat horizontal surface.
Given in addition that the eccentric mass = 2 grams, eccentricity = 2.19 mm, mass of the mobile = 90 grams, g= 9.81 m/s2. Uniform speed of the motor in RPM for which the mobile will get just lifted off the ground at the end Q is approximately
-
View Hint View Answer Discuss in Forum
When lifted from ground at Q
Reaction = 0
∴ taking moments about ‘p’ and equating to 0
.09 × .06 = mr ω2 × .09
9.01 × .09 × .06 = .002 × 2.19 × 10-3 × ω2 × .09
⇒ ω = 366.50 rad/s
= 3500 rpmCorrect Option: B
When lifted from ground at Q
Reaction = 0
∴ taking moments about ‘p’ and equating to 0
.09 × .06 = mr ω2 × .09
9.01 × .09 × .06 = .002 × 2.19 × 10-3 × ω2 × .09
⇒ ω = 366.50 rad/s
= 3500 rpm
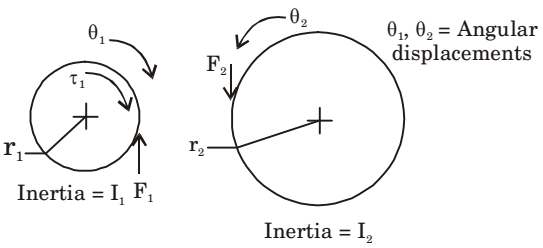
- A pinion with radius r1, and inertia I1, is driving a gear with radius r2 and inertia I2. Torque τ1 is applied on pinion. The following are free body diagrams of pinion and gear showing important forces (F1 and F2) of interaction. Which of the following relations hold true?
-
View Hint View Answer Discuss in Forum
F1 = F2 [Vertical equilibrium]
For Gear 1, For Gear 2,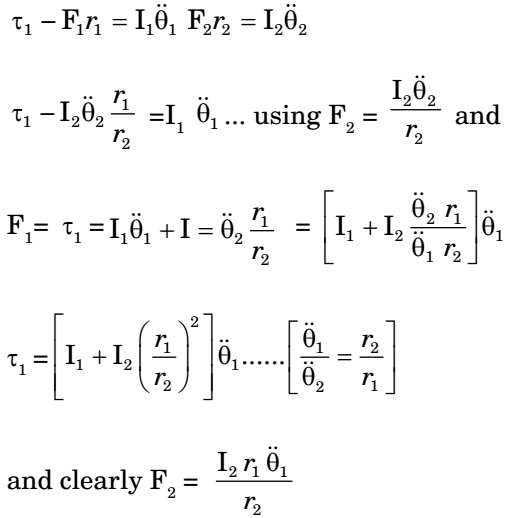
Correct Option: B
F1 = F2 [Vertical equilibrium]
For Gear 1, For Gear 2,
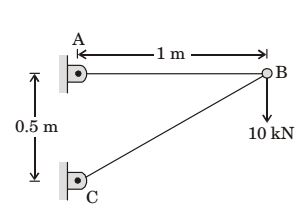
- A two member truss ABC is shown in the figure. The force (in kN) transmitted in member AB is ______
-
View Hint View Answer Discuss in Forum
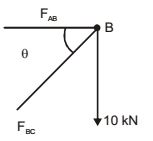
FBD of joint Bθ = tan-1 
0.5 = 26.5 1
∑V = 0FBC sinθ = 10 kN FBC cosθ FAB FAB = 10 = 20 kN tan(26.2) Correct Option: A
FBD of joint Bθ = tan-1 0.5 = 26.5 1
∑V = 0FBC sinθ = 10 kN FBC cosθ FAB FAB = 10 = 20 kN tan(26.2)

