Control system miscellaneous
- An open loop control system results in a response of e– 2t (sin5t + cos5t) for a unit impulse input. The DC gain of the control system is ______.
-
View Hint View Answer Discuss in Forum
g(t) = e – 2 [sin5t + cos5t]
Taking lapcase transform of g(t),∴ G(s) = 5 + s + 2 (s + 2)2 + 52 (s + 2)2 + 52
For DC gain, |G(s)| s = 0G(0) = 5 + 2 = 7 22 + 52 22 + 52 29
Correct Option: B
g(t) = e – 2 [sin5t + cos5t]
Taking lapcase transform of g(t),∴ G(s) = 5 + s + 2 (s + 2)2 + 52 (s + 2)2 + 52
For DC gain, |G(s)| s = 0G(0) = 5 + 2 = 7 22 + 52 22 + 52 29
- For the given system, it is desired that the system be stable. The minimum value of α for this condition is _________.

-
View Hint View Answer Discuss in Forum
From the characteristic equation
1 + G(s) H(s) = 01 + (s + α) = 0 s3 + (1 + α)s2 + (α - 1)s + (1 - α)
∴ s3 + (1 + α)s2 + αs +1 = 0
By Routh Hurwitz criteria
(1 + α) α >1
(α2 + α – 1) > 0
∴ α = 0.618 & – 0.618
But for system to be stable
α = 0.618
Correct Option: D
From the characteristic equation
1 + G(s) H(s) = 01 + (s + α) = 0 s3 + (1 + α)s2 + (α - 1)s + (1 - α)
∴ s3 + (1 + α)s2 + αs +1 = 0
By Routh Hurwitz criteria
(1 + α) α >1
(α2 + α – 1) > 0
∴ α = 0.618 & – 0.618
But for system to be stable
α = 0.618
- The Bode magnitude plot of the transfer function
G(s) = K(1 + 0.5s)(1 + as) I shown below : s 
1 + s 
(1 + bs) 1 + s 8 36 Note that – 6 dB/octave = – 20dB/decade. The value of a is ______________. bK 
-
View Hint View Answer Discuss in Forum
From the magnitude plot,
G(s) = K 
1 + S 
1 + S 2 4 S 1 + S 1 + S 1 + S 8 24 36
Now comparing with given transfer functiona = 1 ; b = 1 4 24
For finding K:
K = (ω)n : where n is no. of poles from the given plot
∴ K = (8)1Now , a = 1 × 8 = 0.75 bk 24
Correct Option: A
From the magnitude plot,
G(s) = K 1 + S 1 + S 2 4 S 1 + S 1 + S 1 + S 8 24 36
Now comparing with given transfer functiona = 1 ; b = 1 4 24
For finding K:
K = (ω)n : where n is no. of poles from the given plot
∴ K = (8)1Now , a = 1 × 8 = 0.75 bk 24
-
The closed-loop transfer function of a system is T(s) = 4 (s2 + 0.4s + 4)
The steady state error due to unit step input is ____.
-
View Hint View Answer Discuss in Forum
T(s) = C(s) = 4 R(s) s2 + 0.4s + 4 ⇒ R(s) - C(s) = E(s) = s2 + 0.4s R(s) R(s) s2 + 0.4s + 4
Steady- state error
Here , R(s) = 1 s 
Correct Option: A
T(s) = C(s) = 4 R(s) s2 + 0.4s + 4 ⇒ R(s) - C(s) = E(s) = s2 + 0.4s R(s) R(s) s2 + 0.4s + 4
Steady- state errorHere , R(s) = 1 s
-
The frequency response of G(s) = 1 plotted in the complex G(jω) [s(s + 1)(s + 2)]
plane (for 0 < ω < ∞) is
-
View Hint View Answer Discuss in Forum
G(s) = 1 s(s + 1)(s + 2) G(jω) = 1 jω(jω + 1)(jω + 2) M = 1 ω√ω² + 1 √ω² + 4 ∠ φ = -90 - tan-1ω - tan-1 ω 2 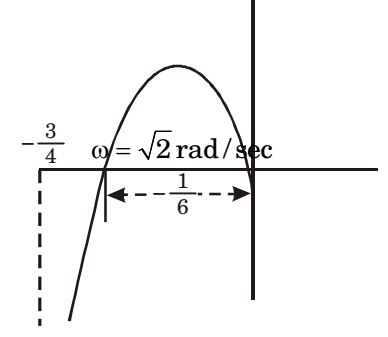
For ω = 0, M = ∞ ; ∠ φ = – 90
For ω = ∞, M = 0; ∠ φ = – 90 – 90 – 90 = – 270
So Cutting Real Axis
Imaginary part of G(jω) = 0
i.e. Img {G(jω)} = 0⇒ Im 
1 
= 0 jω(-ω2 + 3)ω + 2 ⇒ Im 1 = 0 -jω3 - 3ω2 + 2jω ⇒ Im 1 = 0 - 3ω2 + j(2ω - ω3) ⇒ Im -3ω2 - j(2ω - ω3) = 0 (3ω2)2 + (2ω - ω3)2
∴ 2ω – ω3 = 0
⇒ ω2 = 2 . ω = 0
Neglecting ω = 0, we have
ω = √2∴ M |at ω = √2 = 1 = 1 ⇒ 1 < 3 √2 √3 √2 + 4 √36 6 4
Correct Option: A
G(s) = 1 s(s + 1)(s + 2) G(jω) = 1 jω(jω + 1)(jω + 2) M = 1 ω√ω² + 1 √ω² + 4 ∠ φ = -90 - tan-1ω - tan-1 ω 2
For ω = 0, M = ∞ ; ∠ φ = – 90
For ω = ∞, M = 0; ∠ φ = – 90 – 90 – 90 = – 270
So Cutting Real Axis
Imaginary part of G(jω) = 0
i.e. Img {G(jω)} = 0⇒ Im 1 = 0 jω(-ω2 + 3)ω + 2 ⇒ Im 1 = 0 -jω3 - 3ω2 + 2jω ⇒ Im 1 = 0 - 3ω2 + j(2ω - ω3) ⇒ Im -3ω2 - j(2ω - ω3) = 0 (3ω2)2 + (2ω - ω3)2
∴ 2ω – ω3 = 0
⇒ ω2 = 2 . ω = 0
Neglecting ω = 0, we have
ω = √2∴ M |at ω = √2 = 1 = 1 ⇒ 1 < 3 √2 √3 √2 + 4 √36 6 4

