Control system miscellaneous
- The second order dynamic system
dX = PX + Qu y = RX dt
has the matrices P, Q and R as follows :P = 
-1 1 
, Q = 0 , R = [0 1] 0 -3 1
The system has the following controllability and observability properties :
-
View Hint View Answer Discuss in Forum
For controllability,
MC = [Q PQ]MC = 0 1 1 - 3 
Therefore, the system is Controllable.
Now, for observability.M0 = [RT RT pT ] = 0 0 1 - 3 
Therefore, the system is not observable.Correct Option: C
For controllability,
MC = [Q PQ]MC = 0 1 1 - 3
Therefore, the system is Controllable.
Now, for observability.M0 = [RT RT pT ] = 0 0 1 - 3
Therefore, the system is not observable.
- The signal flow graph of a system is shown below. U(s) is the input and C(s) is the output

Assuming, h1 = b1 and h0 = b0 – b1 a1, then input-outputtransfer function, G(s) = C(s) of the system is given by U(s)
-
View Hint View Answer Discuss in Forum
From the signal flow graph, G(s) = C(s) U(s)
By mason’s gain relation,Transfer function = P1 ∆1 + P2 ∆2 + ....... ∆ P1 = h1 ; P2 = h0 S s2 ∆1 = 1 + a1 ; ∆2 = 1 ; s ∆ = 1 + a1 + a0 s s2 Transfer function = h1 1 + a1 + b0 s s s2 = b1s + b0 1 + a1 + a0 s2 + a1s + a0 s s2
Correct Option: C
From the signal flow graph, G(s) = C(s) U(s)
By mason’s gain relation,Transfer function = P1 ∆1 + P2 ∆2 + ....... ∆ P1 = h1 ; P2 = h0 S s2 ∆1 = 1 + a1 ; ∆2 = 1 ; s ∆ = 1 + a1 + a0 s s2 Transfer function = h1 1 + a1 + b0 s s s2 = b1s + b0 1 + a1 + a0 s2 + a1s + a0 s s2
- A single-input single-output feedback system has forward transfer function G(s) and feedback transfer funct i on H (s). It is given that |G(s).H(s)|< 1. Which of the following is true about the stability of the system?
-
View Hint View Answer Discuss in Forum
NA
Correct Option: A
NA
- The block diagram of a system is shown in the figure

If the desired transfer function of the system isC(s) = s R(s) s2 + s + 1
Then G(s) is
-
View Hint View Answer Discuss in Forum

If G(s) = SC(s) = S R(s) s2 + s + 2 Correct Option: B
If G(s) = SC(s) = S R(s) s2 + s + 2
- The transfer function of a second order real system with a perfectly flat magnitude response of unity has a pole at (2 – j3). List all the poles and zeroes.
-
View Hint View Answer Discuss in Forum
System is second order
It means, number of poles = 2
System has perfectly flat magnitude response.
It means, It is all pass system
In all pass system,
Poles and zeros are mirror image about Imaginary axis,
One pole = (2 – j3)
Other pole = (2 + j3)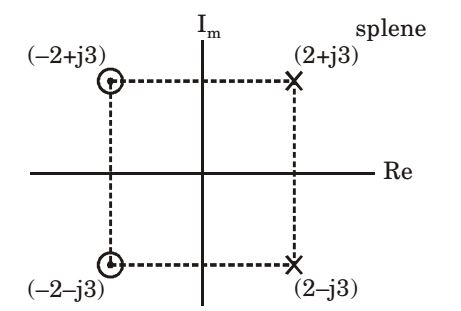
Therefore
poles at (2 ± j3)
zeros at (– 2 ± j3)Correct Option: D
System is second order
It means, number of poles = 2
System has perfectly flat magnitude response.
It means, It is all pass system
In all pass system,
Poles and zeros are mirror image about Imaginary axis,
One pole = (2 – j3)
Other pole = (2 + j3)
Therefore
poles at (2 ± j3)
zeros at (– 2 ± j3)

