Control system miscellaneous
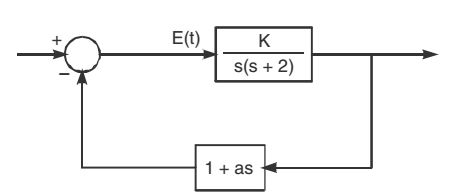
- For the system shown in the figure, with a damping ratio ξ of 0.7. and undamped natural frequency ωn of 4 rad / sec, the values of K and a are
-
View Hint View Answer Discuss in Forum
M(s) = G(s) = K / s ( + 2) 1 + G(s) H(s) 1 + (1 + as) K / s (s + 2)
The characteristic equation is
s (s + 2) + K (1 + as) = 0
⇒ s2 + s (2 + aK) + K = 0
Compare with equation s 2 + 2 ξ ωn s + ωn2 = 0, we get
K = ωn 2 = 42 = 16
∴ 2 ξ ωn = (2 + aK)⇒ a = 2 × 0.7 × 4 - 2 = 3.6 = 0.225 16 16
Correct Option: C
M(s) = G(s) = K / s ( + 2) 1 + G(s) H(s) 1 + (1 + as) K / s (s + 2)
The characteristic equation is
s (s + 2) + K (1 + as) = 0
⇒ s2 + s (2 + aK) + K = 0
Compare with equation s 2 + 2 ξ ωn s + ωn2 = 0, we get
K = ωn 2 = 42 = 16
∴ 2 ξ ωn = (2 + aK)⇒ a = 2 × 0.7 × 4 - 2 = 3.6 = 0.225 16 16
- The Nyquist plot of a loop transfer funct ion G(jω) H(jω) of a system encloses the (– 1, j0) point. The gain margin of the system is
-
View Hint View Answer Discuss in Forum
Gain margin of the system for which Nyquist plot of a loop tr ansfer function G(jω) H(jω) encloses (– 1, + j0) point is less than zero.
Correct Option: A
Gain margin of the system for which Nyquist plot of a loop tr ansfer function G(jω) H(jω) encloses (– 1, + j0) point is less than zero.
- The open-loop transfer function of a unity feedback control system is
G(s) = K(s + 2) (s + 1)(s - 7)
For K > 6, the stability characteristic of the openloop and closed-loop configurations of the system are respectively
-
View Hint View Answer Discuss in Forum
In open-loop system, there is a pole in RHP. So system is unstable.
In closed loop systemT(s) = K(s + 2) s2 + (K - 6)s + 2K - 7
For stability K > 6, 2K – 7 > 0
⇒ K > 6
So for K > 6, system is stable.Correct Option: C
In open-loop system, there is a pole in RHP. So system is unstable.
In closed loop systemT(s) = K(s + 2) s2 + (K - 6)s + 2K - 7
For stability K > 6, 2K – 7 > 0
⇒ K > 6
So for K > 6, system is stable.
- The forward-path transfer function of a unity feedback system is
G(s) = K(s2 - 4) s3 + 3
For the system to be stable the range of K is
-
View Hint View Answer Discuss in Forum
Closed loop transfer function
T(s) = K(s2 - 4) (K + 1)s2 + (3 - 4K)
The system can be only marginally stable.Correct Option: D
Closed loop transfer function
T(s) = K(s2 - 4) (K + 1)s2 + (3 - 4K)
The system can be only marginally stable.
- The feedback system with characteristic equation
s4 + 20 Ks3 + 5s2 + 10s + 15 = 0 is
-
View Hint View Answer Discuss in Forum
By Routh criterion

For this, any value at K the system is unstable.Correct Option: D
By Routh criterion
For this, any value at K the system is unstable.

