Control systems miscellaneous
- Sinusoidal oscillators are—
-
View Hint View Answer Discuss in Forum
NA
Correct Option: B
NA
- Which one of the four signals flow graphs shown in (A), (B), (C) and (D) represents the block diagram shown in given figure?Kindle Edition.

-
View Hint View Answer Discuss in Forum
On drawing the signal flow graph from the given block diagram, we get
Hence alternative (A) is the correct answer.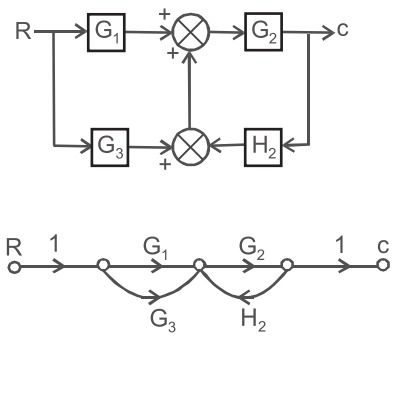
Correct Option: A
On drawing the signal flow graph from the given block diagram, we get
Hence alternative (A) is the correct answer.
- Consider the following properties attributed to state model of a system
1. State model is unique
2. State model can be derived from the system transfer function
3. State model can be derived from time variant systems. Of these statements—
-
View Hint View Answer Discuss in Forum
State model of a system is not unique.
Correct Option: C
State model of a system is not unique.
- For a gain constant K, the phase-lead compensator—
-
View Hint View Answer Discuss in Forum
For a constant gain, the phase lead compensator reduces the slope of the magnitude curve in the entire range of frequency domain. For more detail refer synopsis.
Correct Option: A
For a constant gain, the phase lead compensator reduces the slope of the magnitude curve in the entire range of frequency domain. For more detail refer synopsis.
- Consider the following statements regarding time-domain analysis of a control system
1. Derivative control improves system’s transient performance
2. Integral control does not improve system’s steady state performance
3. Integral control can convert a second order system into a third order system. Of these statements—
-
View Hint View Answer Discuss in Forum
For more detail refer synopsis of integral and derivative control action.
Correct Option: B
For more detail refer synopsis of integral and derivative control action.

