Control systems miscellaneous
- Consider the following signal flow graph, which have the same transfer function, would include—

-
View Hint View Answer Discuss in Forum
NA
Correct Option: C
NA
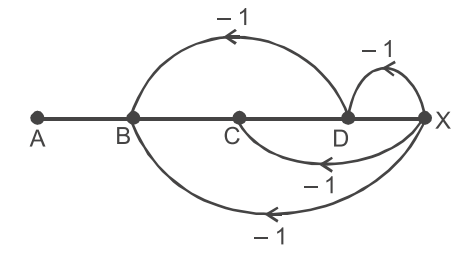
- If the Intermediate variable C in the signal flow graph shown in the figure has a value 10, the input A has a value—

-
View Hint View Answer Discuss in Forum
NA
Correct Option: B
NA

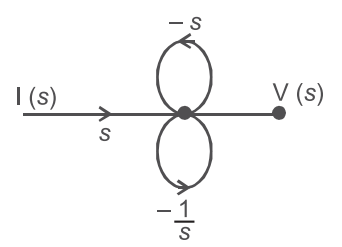
- The transfer function V(s) /I(s) in the signal flow graph shown in the figure is—

-
View Hint View Answer Discuss in Forum
V(s) = sI(s) – sV(s) – V(s)/s
V(s) [1 + s + 1/s] = sI(s)V(s) = s = s2 I(s) 1 + s +1/s s2 + s + 1

Correct Option: A
V(s) = sI(s) – sV(s) – V(s)/s
V(s) [1 + s + 1/s] = sI(s)V(s) = s = s2 I(s) 1 + s +1/s s2 + s + 1
- The condition of a stability for a unity feedback control system whose open loop transfer function is given by
G(s) = e–sT s(s + 2)
-
View Hint View Answer Discuss in Forum
Given
G(s) = e-sT . H(s) = 1 s(s + 2)
We know that,C(s) = G(s) R(s) 1 + G(s)H(S)
orC(s) = e-sT R(s) s22s - e-sT
The C.E. s2 + 2s + e–sT = 0
or
s2 + 2s + (1 – st + st2/2! – ……) = 0
or
s2 + 2s + 1 – st = 0
or
s2 + s (2 – t) + 1 = 0
for stability 2 – T > 0
or
T < 2Correct Option: A
Given
G(s) = e-sT . H(s) = 1 s(s + 2)
We know that,C(s) = G(s) R(s) 1 + G(s)H(S)
orC(s) = e-sT R(s) s22s - e-sT
The C.E. s2 + 2s + e–sT = 0
or
s2 + 2s + (1 – st + st2/2! – ……) = 0
or
s2 + 2s + 1 – st = 0
or
s2 + s (2 – t) + 1 = 0
for stability 2 – T > 0
or
T < 2
- Consider the following overall T.F. for a unity feedback system
= 4 s2 + 4s + 4
Which of the following statements regarding this system are correct?
1. Position error constant KP for the system is 4.
2. The system type one.
3. The velocity error constant Kv for the system is finite.
Select the correct answer code—
-
View Hint View Answer Discuss in Forum
NA
Correct Option: D
NA

